例えば、故障しないように、パーツの数が少ないシンプルな機構が求められる。
「おもちゃづくりもそういうところを得意としています。モーターの数を減らしたり、このパーツの形を変えれば1つで2役できるよ、ということを、常日頃から考えている。それによって故障が減り、コストも下がり、お子様の手の届きやすい製品ができる。そういうマインドを炸裂させながらSORA-Qの開発を進めました」
始まりは昆虫ロボット
2015年4月、JAXAは火星探査や月面基地建設などを研究する組織「宇宙探査イノベーションハブ」を立ち上げ、さまざまな分野から人材や知識を求めた。その募集テーマの一つが、小粒でも情報収集能力の高い「昆虫ロボット」の研究開発だった。
その募集を同社のメンバーが見かけ、「宇宙開発に貢献できるのではないか」と手を挙げることになった。ゾイドシリーズには昆虫をモチーフにした「実績」もあった。
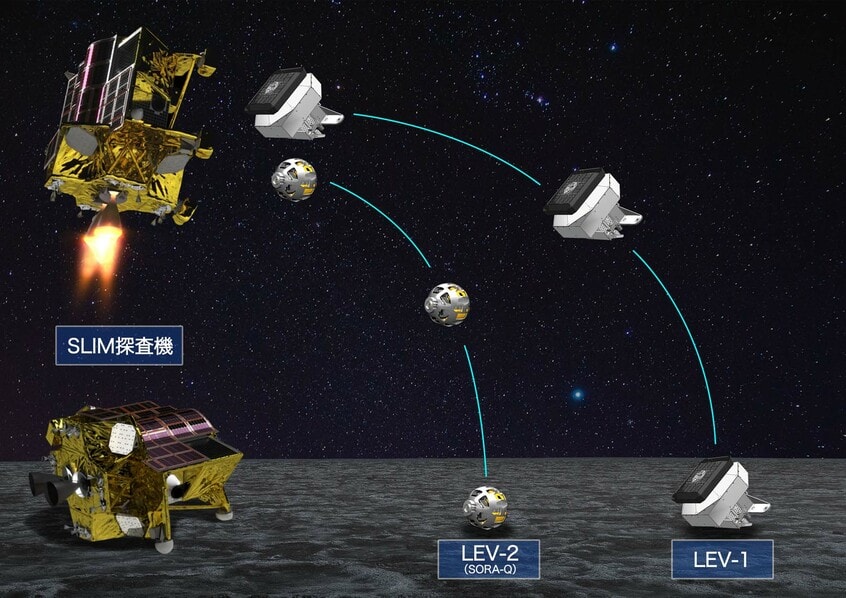
JAXAとの共同研究開発が始まったのは2016年4月。その後、具体化した月面ロボットの開発では、重量300グラム以内、大きさ80ミリ以下という仕様が求められた。
「一番苦労したのは、このサイズで、『レゴリス』と呼ばれる月面のサラサラな砂をどうやって攻略するかでした」
車が砂地を走るとき、小さいタイヤほど砂に埋もれてスタックしやすくなる。そして月のレゴリスは、地球上の砂よりもさらに粒が細かいのだ。
当初の試作機は小さなタイヤのような姿で、転がるように移動するようにした。ところがレゴリスを模した砂を敷き詰めた試験場を走らせると、すぐにスタックしてしまった。
砂の斜面を攻略
そこで思い浮かんだのが「月面に着いた後に変形させ、サイズを大きくすればいい」というアイデアだった。同社には、さまざまな方法でおもちゃを変形する技術の蓄積があった。